核心技術
AVM360環視
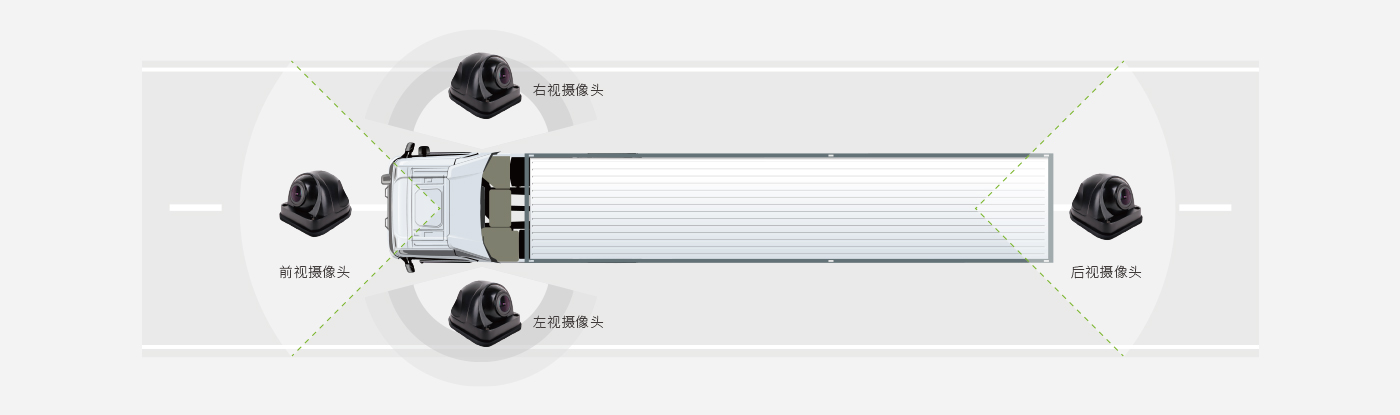
利用車身四周攝像頭,拼接出以車身為中心的360°環視畫面,直接鳥瞰車身周邊情況。支持多種車型,具有4路、6路、或前3/后3等多種方案可供選擇。同時,算法具有平衡不同攝像頭畫面亮度、無視攝像頭安裝傾角的能力,使得最終呈現的環視畫面亮度統一,效果更真實。
多個獨立超廣角攝像頭采集圖像,控制器對所拍攝圖像進行畸變矯正和無縫拼接等處理后 最終形成車輛周邊360°的虛擬鳥瞰圖。實時檢測全車周圍行人、機動車和障礙物,判斷其移動方位與距離。